

SLC Timing Decoder
Bei unseren Geräten wird öfters auf ein sogenanntes SLC Protokoll zurückgegriffen. Dies ist ein internes Protokoll und kommuniziert über die RS485 Schnittstelle. Leider treten ab und zu Timing Fehler auf. Diese entstehen durch Toleranzunterschiede der Baudrate beider HW Komponenten. Durch längere Datenpakete wird die Zeitverschiebung grösser und führt schlussendlich zu einem Übertragungsfehler. Es soll ein Produkt entwickelt und aufgebaut werden, mit dem Timing- Fehler detektiert und ausgewertet werden können. Sobald ein Fehler detektiert wird, soll ein Trigger Signal an ein Oszilloskop übergeben werden, welches mit einer Live Überwachung den Fehler aufzeichnen kann.
Das fertige Produkt

Timing Decoder und dessen Dokumentation
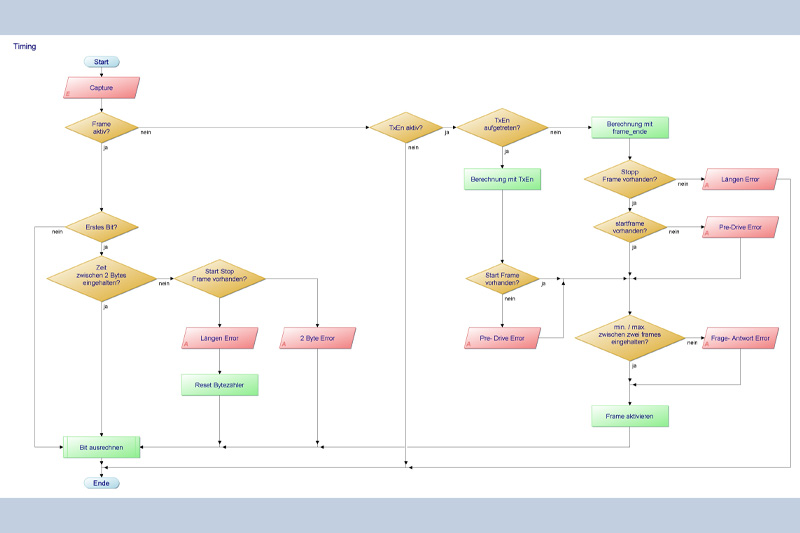
Grobes Flussdiagramm
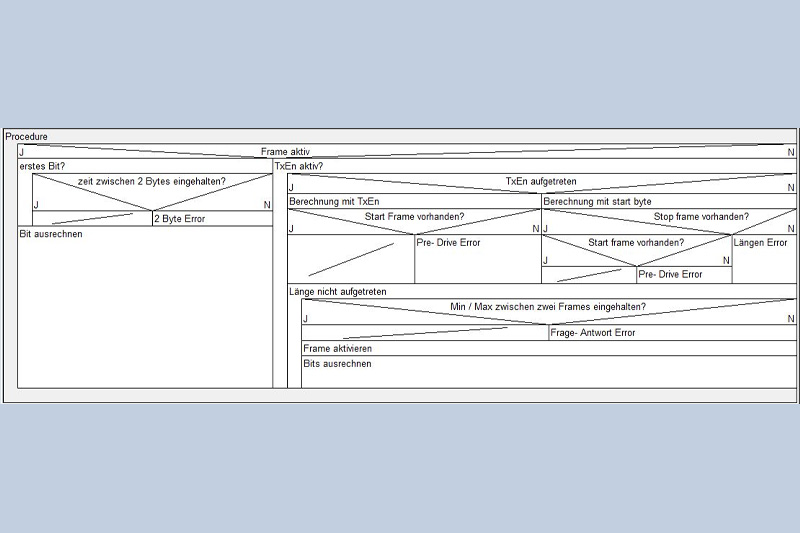
Struktogramm
Prototyp der Hardware
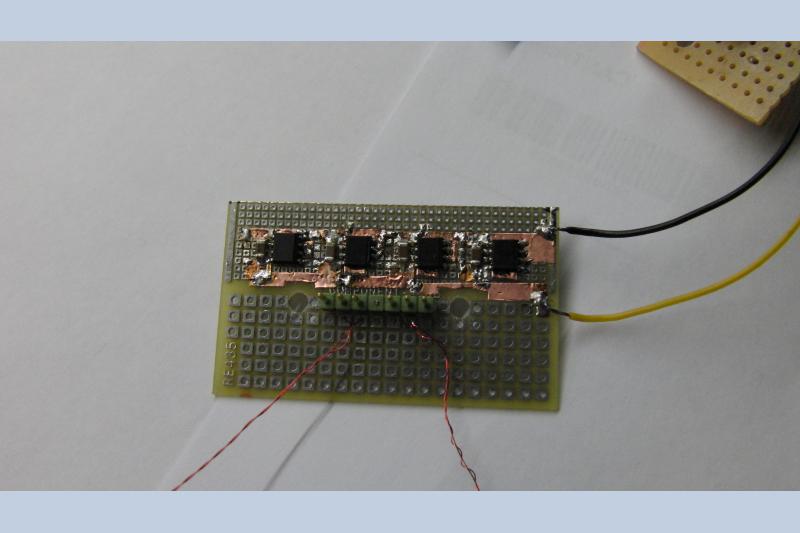
Um dem schwingen der HighSpeed Operationsverstärkern vorzubeugen, wurde die GND-Fläche vergrössert
- Pre- und Postdrive time beim Versenden eines Paketes
- Zeit zwischen 2 Bytes innerhalb eines Paketes
- Zeit zwischen Frage und Antwort (Minimum und Maximum einstellbar)
- Minimale Zeit zwischen 2 beliebigen Frames
- Auswertung ungültiger Frames (CRC- Error, ungültige Länge, usw.)
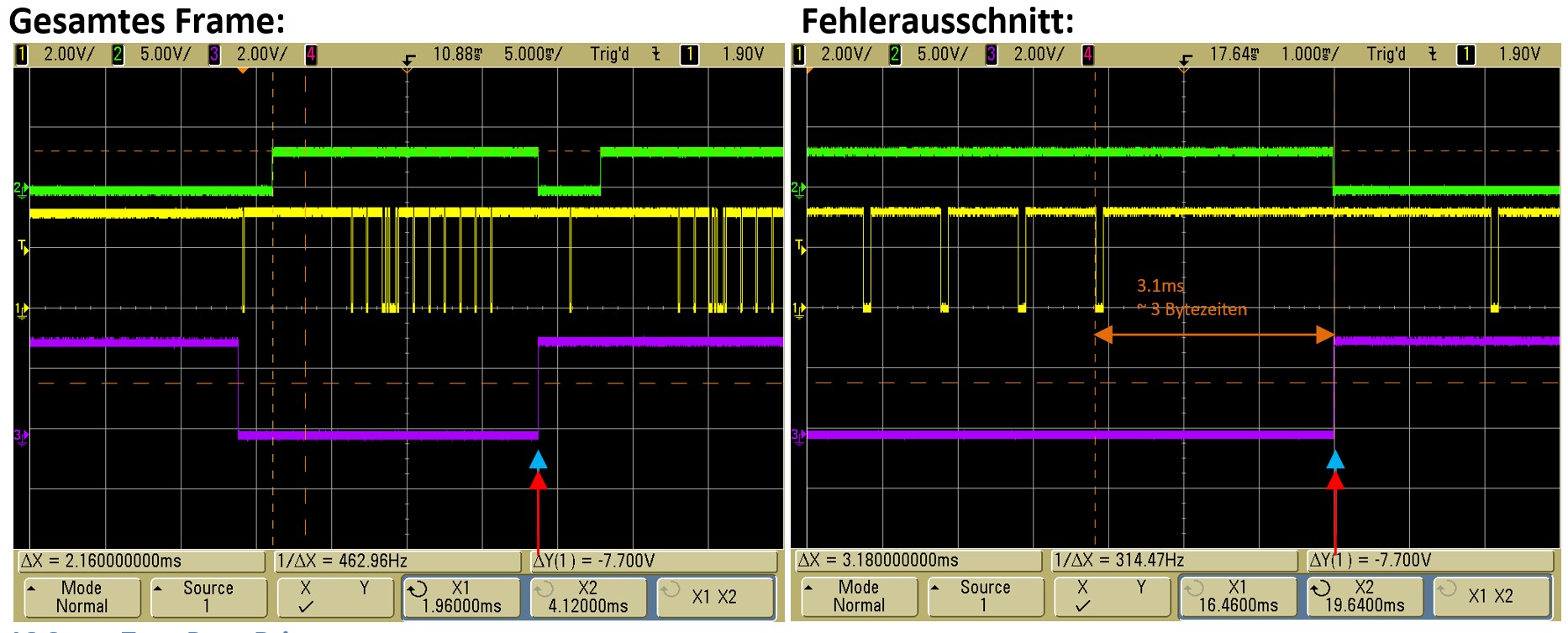
Mittels verschiedener Logik werden die Interrupts der Timer ausgewertet und bei Fehlern ein Triggerimpuls ausgelöst. Als Beispiel die Auslösung bei einem PostDrive Fehler. In diesem Beispiel Löst der Timing decoder aus, da das Stopframe kürzer als 4 Bytes ist.
Download
| Downloads nicht verfügbar | |